最近看到有人在分享程序化动画绑定的视频,这让我想到多年前曾构造过的自动化设置,没有sdk,没有复杂的数学,只是简单的向量混合
如视频所示,移动小虫重心可以带动腿部的圈,圈分为内圈和外圈,并且有A B两个定位器在实时做判定(A B 两个定位器并不跟着重心走) , 当定位器A的当前世界位置超过内圈半径 会瞬间跳到圆心 定位器B超过外圈半径 同样跳到圆心,循环反复,这时就可以在这两个定位器的时间间隔上做一些事情,当定位器A跳到圆心的瞬间,就开启一个混合计算,混合两个定位器的向量给到腿IK组, 之后可以通过驱动圈的位置和半径 来控制左右腿的抬起时机和频率,这种方法不用担心腿部打滑,并且移动旋转不会逻辑冲突
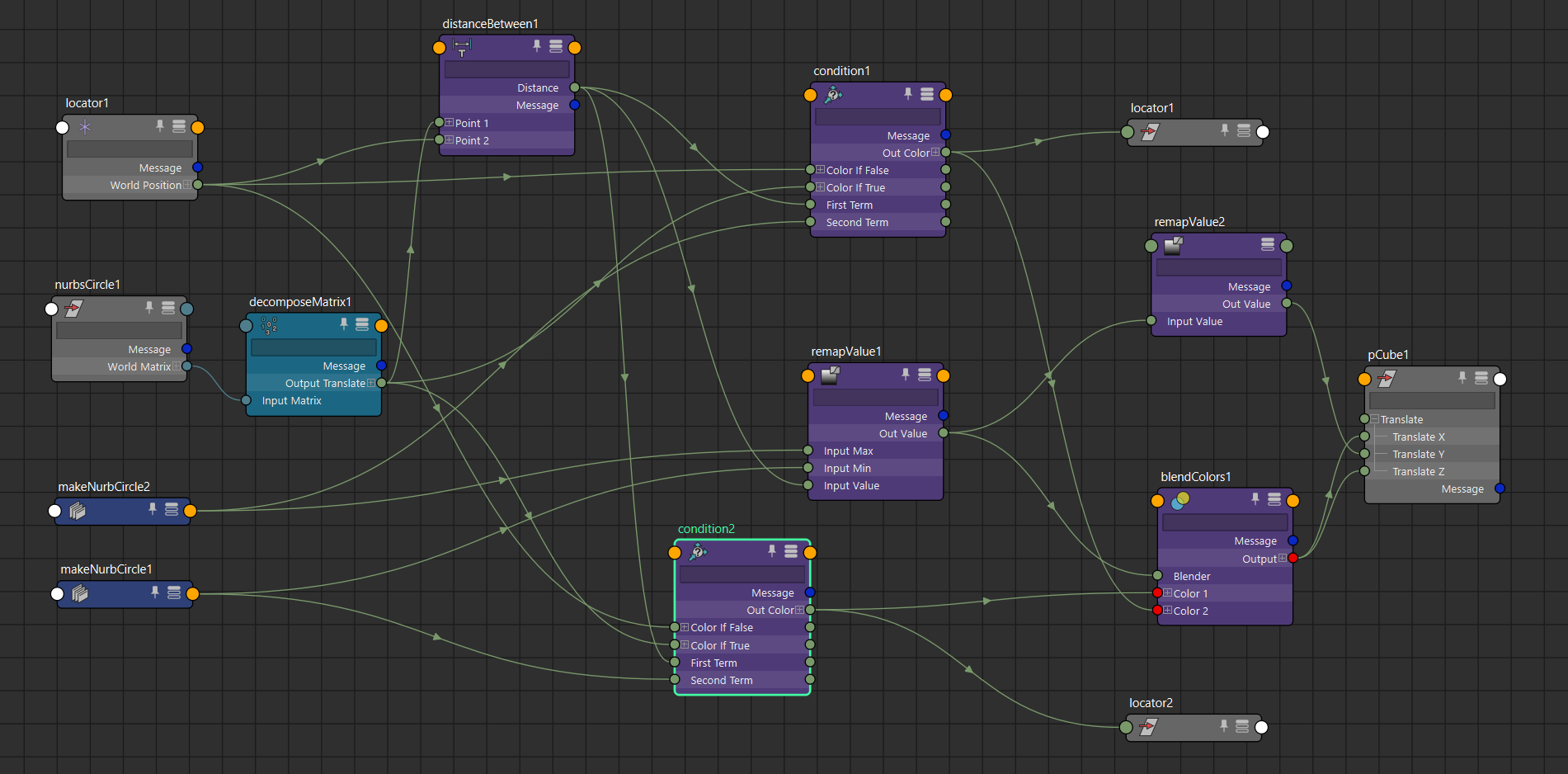
节点图如下:

大佬可以发下那个小盒子的文件学习一下吗,如果方便的话
哈哈,我做出来了,但是目前会循环,我再看下,谢谢大佬分享
我记得循环警告里面包含一个代码,输入代码这个警告就消失了,这个节点图是我在其他dcc软件上的思路转化过来的 maya或许还有更加好的方法
我也想学习! 可以共享c4d文件吗?